Researcher(s)
Supervisor(s)
Dr. Samaraweera KKMNP / Prof. Jayaweera ND / Dr. Sugathapala AGT
Abstract
Animal flight has fascinated human imagination all along the history. Insects, birds and mammals capable of flight have been studies by a broad scientific community including biologist, engineers and physicists to gain insight into the mechanisms of flight. Numerous previous researches have proved deeper understanding of animal flight can lead to improvements in aircraft technologies. Also, the interests in Unmanned Arial Vehicles (UAVs) and Micro Air Vehicles (MAVs) have rekindled the interests in flapping wing aerodynamics. Achieving the superior flight efficiency and maneuverability of large bird has become the main objective of UAV engineers.
The motivation of the research is to improve the understanding of flapping wing aerodynamics using both experimental and computational approaches. Apart from investigating effects of wing motion on flight propulsive efficiency and force generation, the research provides a great platform for future development. Computer numerical control systems for airfoil motion and Particle Image Velocimetry (PIV) set-up are designed to be useful in future investigations as well. Development of numerical framework to simulate flapping flight would facilitate future developments of bio-inspired aircrafts. Data and knowledge gained through-out the research would be valuable in designing next generation of UAVs and MAVs. The experience and knowledge gained on computer modeling would be valuable in numerous other applications.
Keywords
Aerodynamics, Animal-flight, flapping-wings
Results
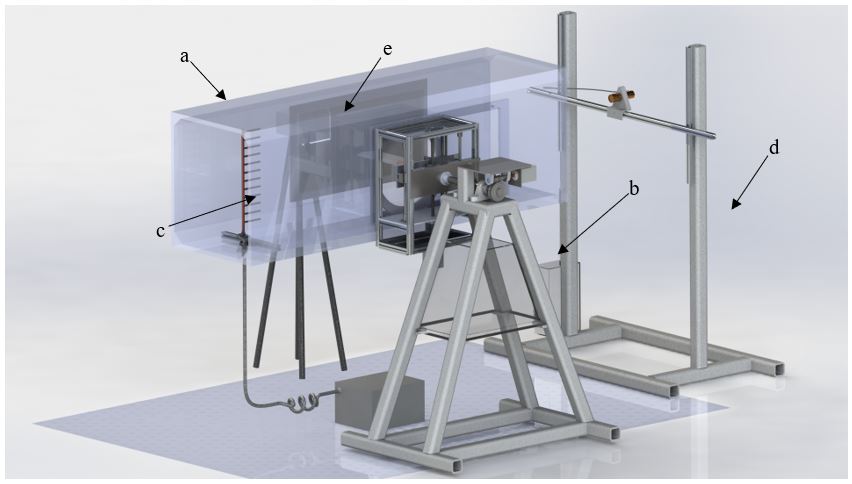
Figure 1. Designed experimental set-up, a: Wind tunnel test section, b: Wing motion control system, c: Smoke emitter sub-assembly, d: Adjustable laser positioning sub-assembly, e: High frame rate camera sub-assembly.

Figure 2. Designed computer numerical control system for wing motion, a: support structure, b: container for electronics, c: main platform, d: motor driven ball screw for plunge control, e: motor and gearbox mechanism for pitch and heave control, f: motor driven worm and wheel mechanism for plunge axis angle control.