Researcher(s)
Supervisor(s)
Prof. Amarasinghe YWR / Dr. Dayananda NWN
Laboratory
Abstract
Most of the tools used in Minimally Invasive Surgeries are hand held slender instruments with limited degrees of freedom achieved by conventional actuation mechanisms. In this research, a Shape Memory Alloy (SMA) based approach was employed to improve the functionality of the tools.
SMAs are smart alloys which can remember a parent shape according to the heat treatment temperature and aging time applied to it, and accordingly provides unique activation temperatures. A Differential Scanning Calorimetric analysis was conducted in order to estimate transformation temperatures. Material samples were subjected to observations under Optical microscope and Scanning Electron Microscope to observe morphology and then to find out elemental composition respectively.
A Commercially available SMA material known as NiTiNOL was selected to manufacture an SMA spring actuator with the use of specially designed fixtures. The spring actuator was characterized in terms of force and stroke using a custom developed apparatus. Apparatus was controlled by a PID based multifunctional controller and the data acquisition was performed using a customized PC based Graphical User Interface (GUI).
The spring actuator was applied to a gripper mechanism and a Laparoscopic retractor tool to validate its performance. The mechanisms were validated using numerical simulation. Both the apparatuses were controlled and data were acquired though dedicated controllers and GUIs.
Keywords
Shape Memory Alloy; Minimally Invasive Surgeries; Differential Scanning Calorimetry; PID controlling; SMA Spring Actuated Gripper; Laparoscopic Retractor
Results

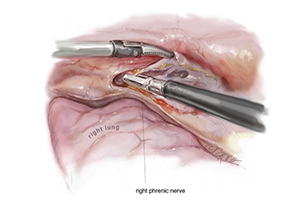
Figure 1. MIS Procedure (a) A Surgeon Performs a MIS; (b) A Schematic of Camera View of a MIS
(a) https://safemedtrip.com/wp-content/uploads/2013/04/Minimally_Invasive_Neurosurgery.jpg
(b) R. H. Petersen, “Video-assisted thoracoscopic thymectomy using 5-mm ports and carbon dioxide insufflation,” Ann. Cardiothorac. Surg., vol. 5, no. 1, pp. 51–55, Jan. 2016, doi: 10.3978/9055.

Figure 2. Sophisticated Tools Used in MIS
https://www.pinterest.com/pin/390335492686920302/
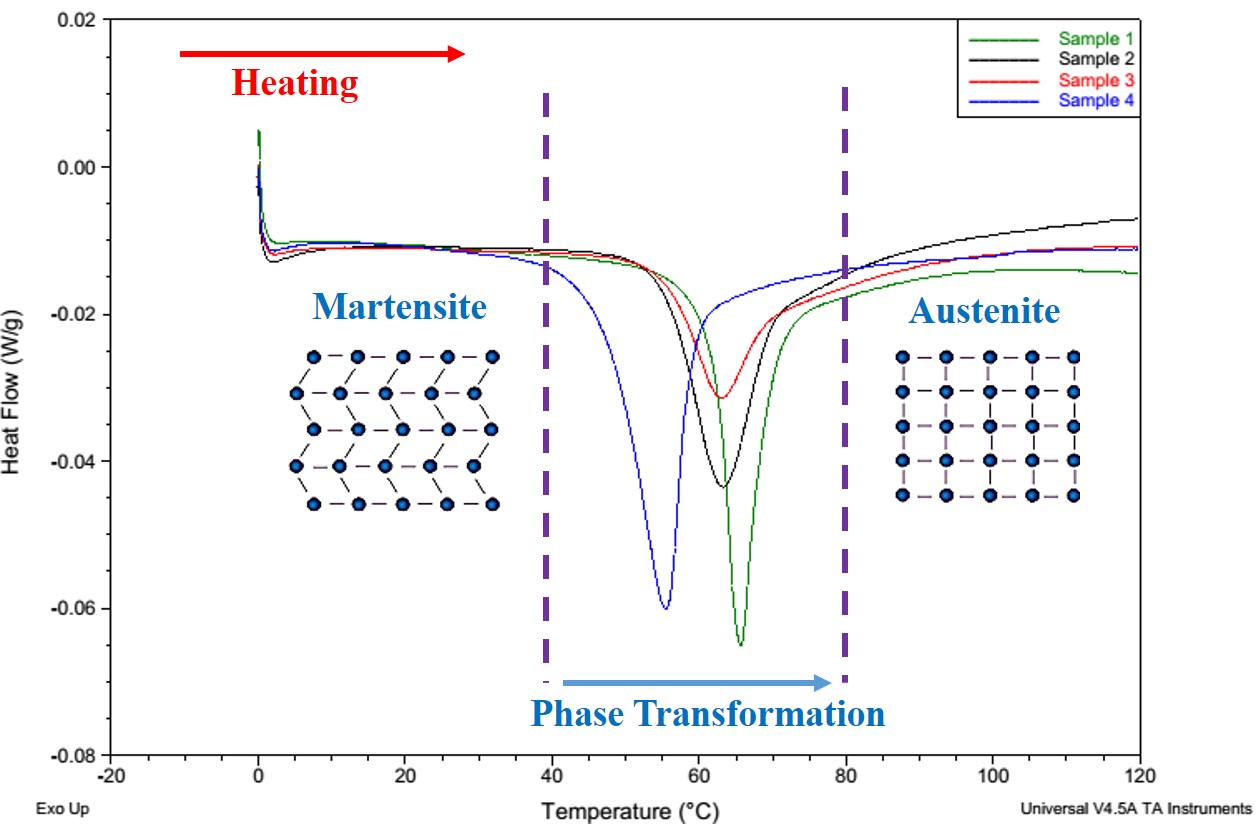
Figure 3. DSC Heat Flow vs Temperature Curve for Heating Cycle
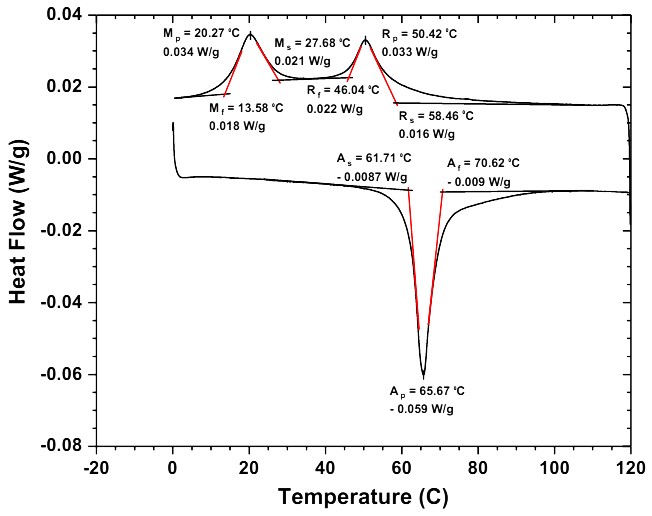
Figure 4. Software Analyzed Thermogram Indicating Transformation Temperatures
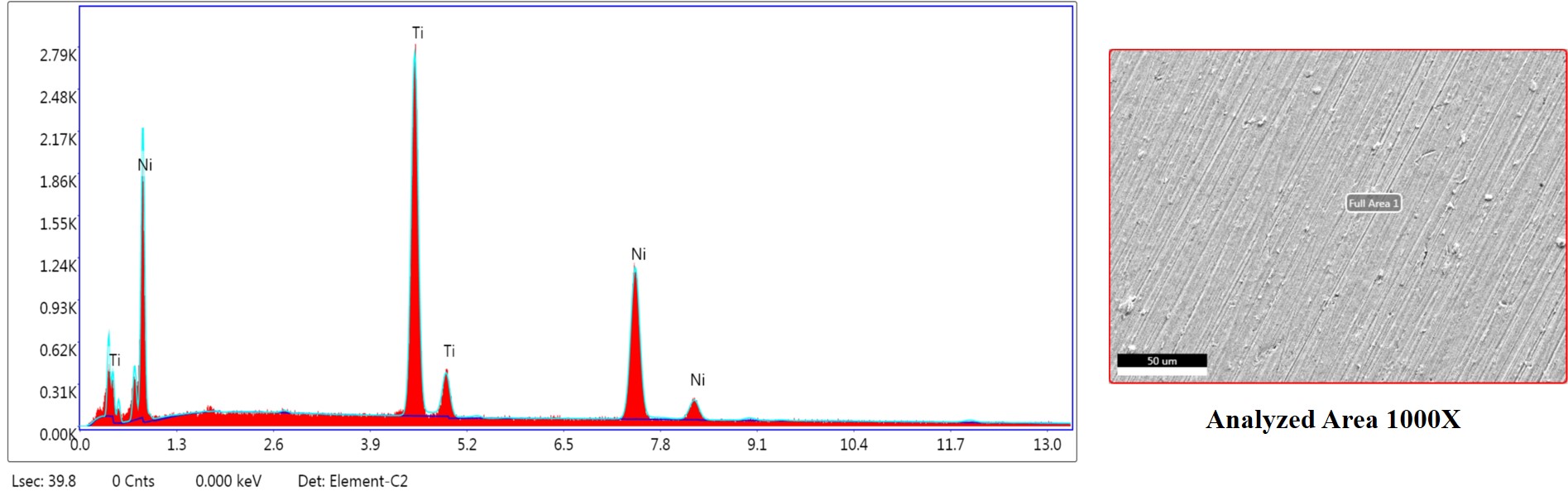
Figure 5. EDX Spectrum of NiTiNOL Sample and the Analyzed Area at 1000X
Figure 6. Spring Fabricated by the Fixture (a) Fixture after Heat Treatment; (b) Shape Set Spring Attached to the Fixture; (c) Fabricated SMA Spring
Figure 7. Layout of the Spring Force Measuring Apparatus
Figure 8. Force Results for 1.0 mm SMA wire diameter
Figure 9. Developed Controller Specifications
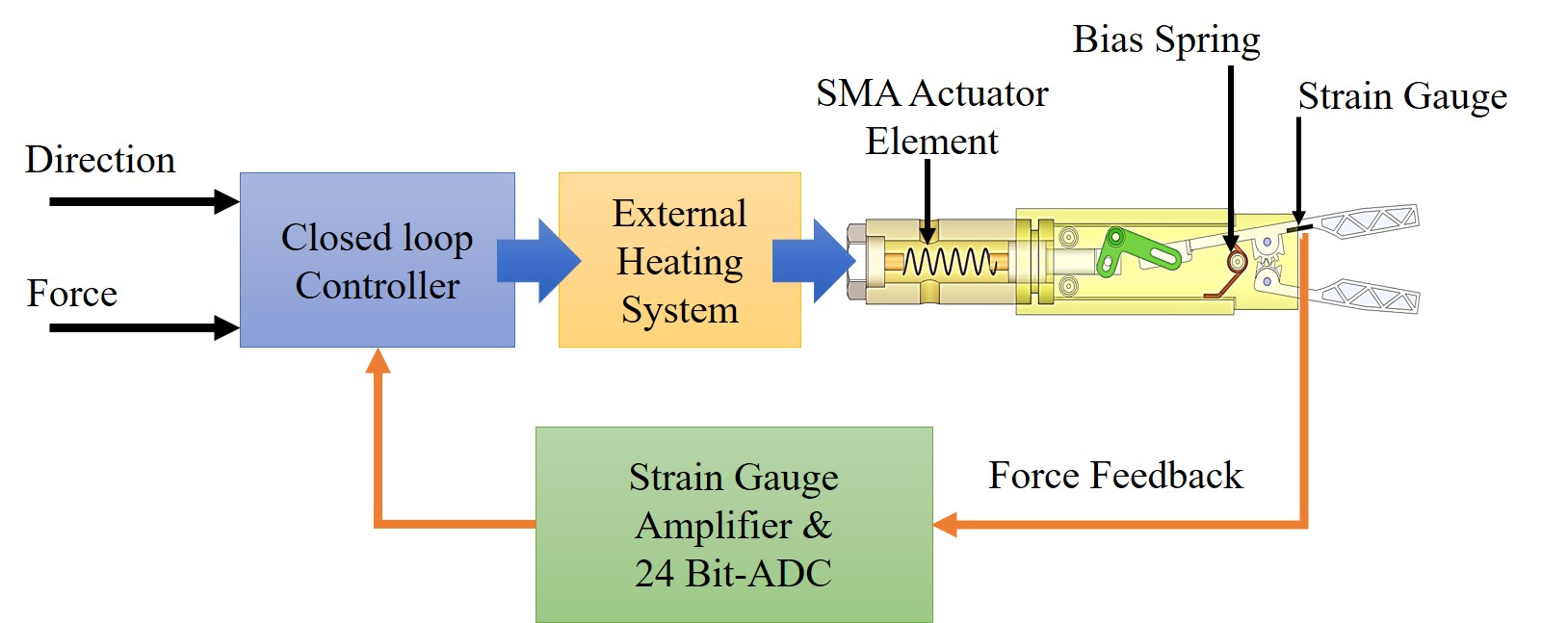
Figure 10. Gripper Force Sensing and Controlling Method
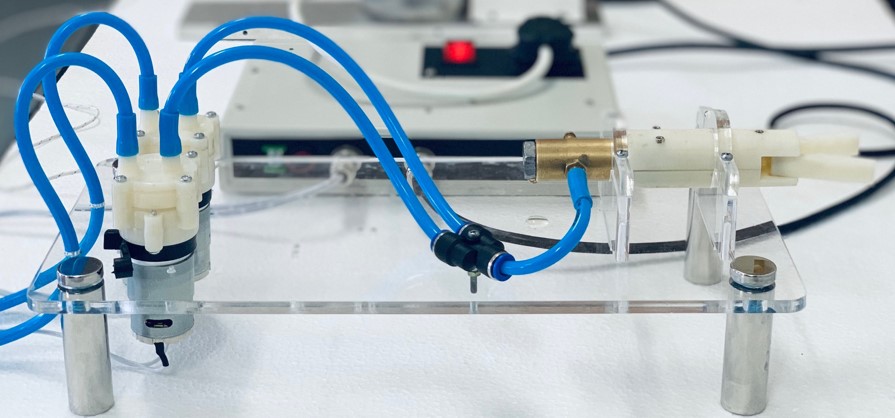
Figure 11. Gripper Testing Apparatus
Publications
-
U. Roshan, L. Perera, R. Amarasinghe, and N. D. Nanayakkara, “Fabrication, and Experimental Evaluation of Shape Memory Alloy Based Spring Actuators for Laparoscopic Grippers,” in Sustainable Design and Manufacturing, vol. 262, S. G. Scholz, R. J. Howlett, and R. Setchi, Eds. Singapore: Springer, 2022, pp. 224–234, Available online: https://link.springer.com/chapter/10.1007/978-981-16-6128-0_22.
-
U. Roshan, R. Amarasinghe, and N. Dayananda, “Design and Fabrication of a Minimally Invasive Surgical Device with Customized Shape Memory Alloy Spring Actuator,” J. Robot. Netw. Artif. Life, vol. 5, no. 3, pp. 194–198, Nov. 2018, doi: 10.2991/jrnal.2018.5.3.11.
-
U. Roshan, J. B. Basnayake, R. Amarasinghe, and N. Dayananda, “Design and Development of a Force Feedback System for a SMA Based Gripper as a Minimally Invasive Surgical Tool,” in 2019 IEEE SENSORS, Oct. 2019, pp. 1–4, doi: 10.1109/SENSORS43011.2019.8956849.
-
T. A. U. Roshan, B. A. D. J. C. K. Basnayake, Y. W. R. Amarasinghe, D. Wijethunge, and N. D. Nanayakkara, “Development of a PID Based Closed Loop Controller for Shape Memory Alloy Actuators,” in 2018 Moratuwa Engineering Research Conference (MERCon), May 2018, pp. 460–464, doi: 10.1109/MERCon.2018.8421929.
-
T. A. U. Roshan, Y. W. R. Amarasinghe, and N. W. N. Dayananda, “Design and Development of a Shape Memory Alloy Spring Actuated Gripper for Minimally Invasive Surgeries,” B-Con Plaza, Beppu, Oita, Japan, Feb. 2018, pp. 566–569.