Researcher(s)
Supervisor(s)
Laboratory
Bionics Laboratory, Motion Analysis Laboratory
Abstract
Continuous improvements of exoskeletons (wearable robots) is essential to enhance their performance and the user experiences. Therefore, it is necessary to determine user comfort levels while wearing wearable robots. This aspect can be analyzed by determining human-robot interaction (HRI). The HRI is classified in cognitive-HRI (cHRI) and physical-HRI (pHRI) in the literature. cHRI involves the identification of complex human expression and physiological aspects. These information can be observed using a human-robot cognitive interface. Electroencephalogram (EEG) and electromyography (EMG) are mainly used sensing methods in cHRI. Furthermore, pHRI involves evaluating physical quantities such as position, force, and pressure between humans and robots.
This research is carried out to investigate the effect of HRI with lower limb exoskeletons. In order to determine HRI, experiments are carried out with a dummy lower limb exoskeleton which was designed and fabricated in compliance with human ergonomics and biomechanics. Furthermore, sEMG, motion analysis, and SMP sensory systems were used to carry out the experiments. Moreover, a simulation lower limb model with ground force reaction prediction was developed to determine the inverse dynamics. The experiments were carried out with six healthy subjects for the walking motion without exoskeleton, with the exoskeleton, and exoskeleton with weight attachments. A qualitative, comfortable level analysis was carried out simultaneously for each experiment. The experiment results have provided better understanding of HRI for developing ergonomically comfortable lower limb exoskeleton devices.
Keywords
Lower-limb Exoskeletons, Human-Robot Interaction, Electromyography, Inverse Dynamics
Results
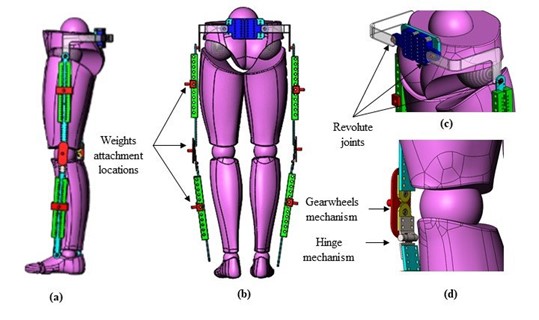
Figure 1. Dummy exoskeleton, (a) lateral view of the exoskeleton, (b) frontal view of the exoskeleton, (c) hip mechanism, and (d) knee mechanism.
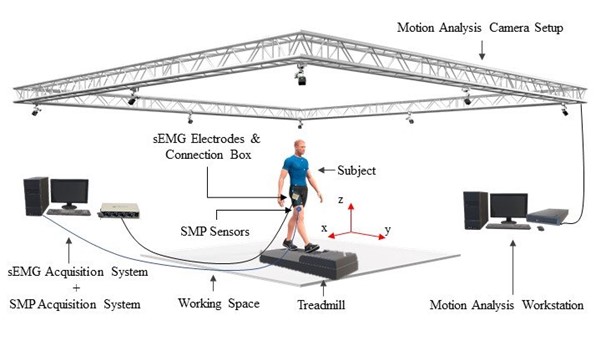 Figure 2. Experiment Setup.
Figure 2. Experiment Setup.
Publications
- Chandrasiri, M.D.S.D., Ranaweera, R.K.P.S. and Gopura, R.A.R.C., 2019, July. Development of a surface muscle pressure monitoring system for wearable robotic devices. In 2019 Moratuwa Engineering Research Conference (MERCon) (pp. 544-549). IEEE.
- Chandrasiri, M.D.S.D., Ranaweera, R.K.P.S. and Gopura, R.A.R.C, Kazuo Kiguchi., 2018, August. Development of a sensory system to detect surface muscle pressure. In 2018 6th international Conference on Sri Lanka - Japan Collaborative Research
- Chandrasiri, M.D.S.D., Ranaweera, R.K.P.S. and Gopura, R.A.R.C., 2018, April. Electromyography and surface muscle-pressure as measures of lower-limb muscle activities during squatting. In 2018 4th International Conference on Control, Automation and Robotics (ICCAR) (pp. 257-261). IEEE.