Researcher(s)
Supervisor(s)
Dr. Chathuranga KVDS / Prof. Gopura RARC / Dr. Lalitharatne SWHMTD
Laboratory
Computational Sensing and Smart Machines (CSSM) laboratory
Abstract
This research focuses on developing soft robotic actuators for use in wearable assistive exosuits. Modern exosuit development is leading the way in replacing the contemporary exoskeleton systems which are, bulky, rigid, and restrictive for natural human motion, in many applications. These exosuits require flexible, lightweight actuators with high force-to-weight ratios. The aim of this research is to develop soft robotic artificial muscle actuators, which can contract like biological muscles to power the future exosuits. Concepts such as being low-profile, flexible, having guided contraction, quick self-return, and rapid actuation and novel displacement sensing techniques has been combined to develop the future soft linear vacuum artificial muscle actuators.
Keywords
Actuators, Exosuits, Prosthesis, Soft robotics, Wearable systems
Results
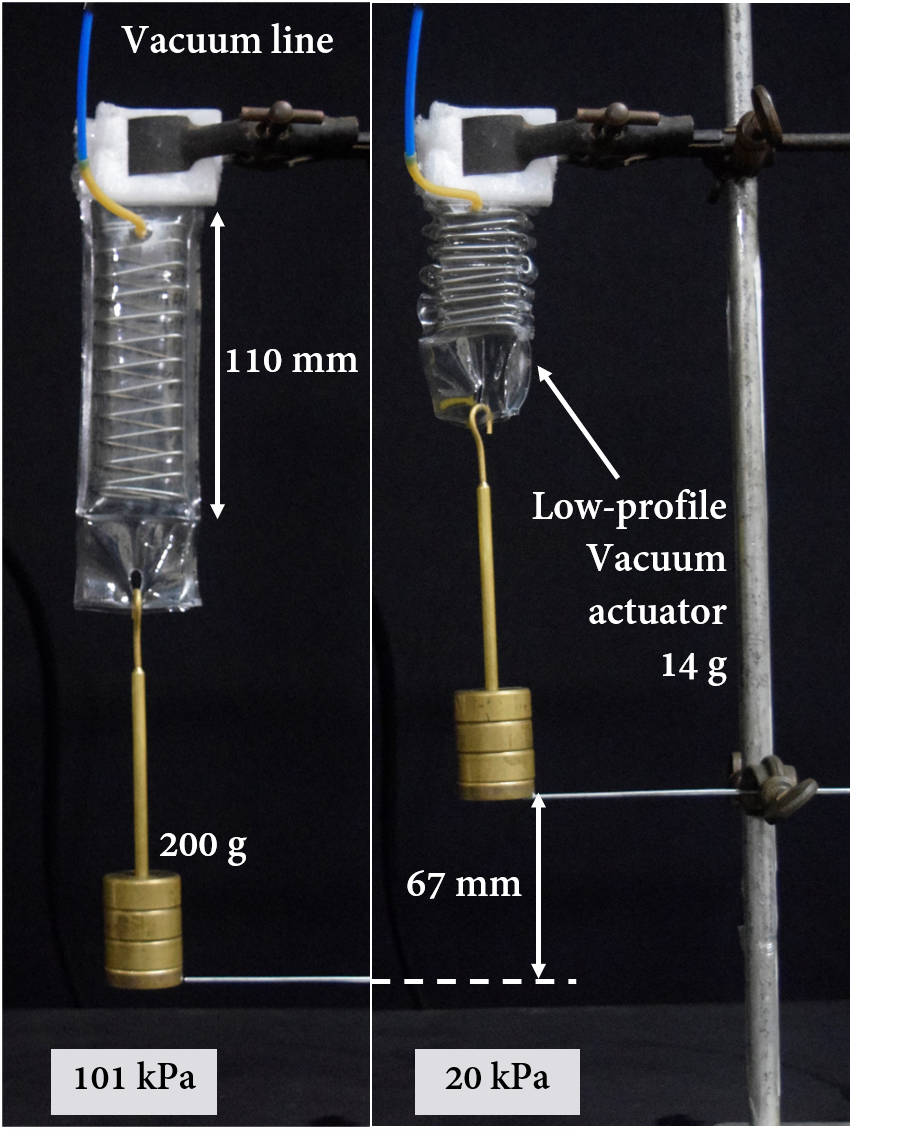
Figure 1. A novel low-profile vacuum actuator (14 g) is shown that can lift a weight of 200 g at 20 kPa (abs.) pressure. The actuator shows a strain of 60.9 %.
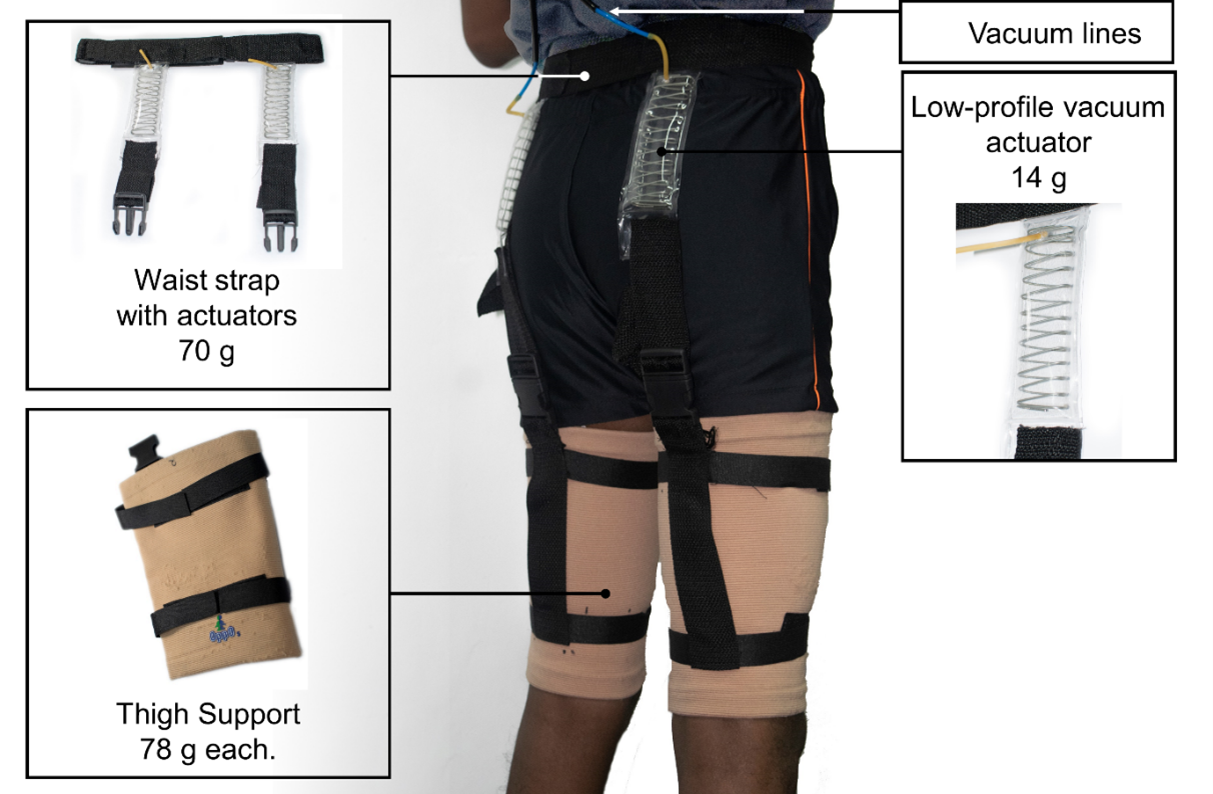
Figure 2. Low-profile vacuum actuator and soft exosuit with the actuators integrated. This exosuit is designed for sit-to-stand transition assistance for the elderly and patients with lower limb weaknesses. This suit showed a mean muscle activity reduction ~ 45% on healthy test subjects.
Publications
- R. B. Arumathanthri, A. L. Kulasekera, and D. S. Chathuranga, “An Induction Type Displacement Sensor used in a Novel Soft Robotic Muscle Actuator,” in 2020 International Conference on Image Processing and Robotics (ICIP), 2021.
- A. L. Kulasekera, R. B. Arumathanthri, D. S. Chathuranga, T. D. Lalitharatne, and R. C. Gopura, “A Low-Profile Vacuum Actuator: Towards a Sit-to-Stand Assist Exosuit,” in 2020 3rd IEEE International Conference on Soft Robotics, RoboSoft 2020, 2020, pp. 110–115.
- A. L. Kulasekera, A. Osorio, Y. Sugahara, and Y. Takeda, “A novel scalable SMA actuator using thermally conductive fluid: Its concept and basic characterization,” in 2019 37th Annual Robotics Society of Japan conf., RSJ Conf 2019, Waseda Univ., Tokyo
- A. L. Kulasekera, R. B. Arumathanthri, D. S. Chathuranga, T. D. Lalitharatne, and R. C. Gopura, “Development and preliminary evaluation of a soft-exosuit for sit-to-stand assistance,” in 2019 11th Multidisciplinary International Student Workshop , MISW2019, August 7-8, 2019, Tokyo Institute of Technology, Tokyo, Japan
- C. P. Premarathna, A. L. Kulasekera, D. S. Chathuranga, and T. D. Lalitharatne, “A Novel Fabrication Method for Rapid Prototyping of Soft Structures with Embedded Pneumatic Channels,” in MERCon 2019 - Proceedings, 5th International Multidisciplinary Moratuwa Engineering Research Conference, 2019, pp. 430–435.